En esta fase vamos a montar un sistema básico de alumbrado de un vehículo.
El sistema es el siguiente:
1º Luces de cruce: estarán conectadas a una fotorresistencia para que se enciendan automáticamente cuando llegan a cierta oscuridad.
2º Luces de freno: se encenderán cuando se pulse el botón de freno
3º Intermitentes: cuando se pulse el botón de giro a la izquierda se encenderán los intermitentes de la izquierda y cuando se pulse el botón de giro a la derecha se encenderán los intermitentes de la derecha.
4º Luces de marcha atrás: se encenderán cuando se pulse el botón de marcha atrás.
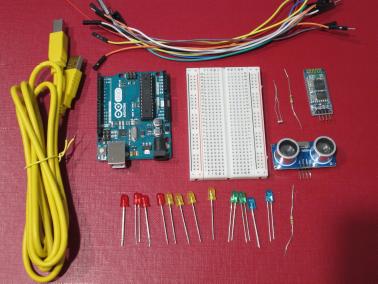
5º Luces de emergencia: cuando el sensor ultrasónico marque menos de 20 cm. lo que hará que se enciendan los cuatro LEDs amarillos.
Materiales
Seguir leyendo «Fase 2 – Sistema de alumbrado» →